-
 寧夏螺桿型直交機械手廠家
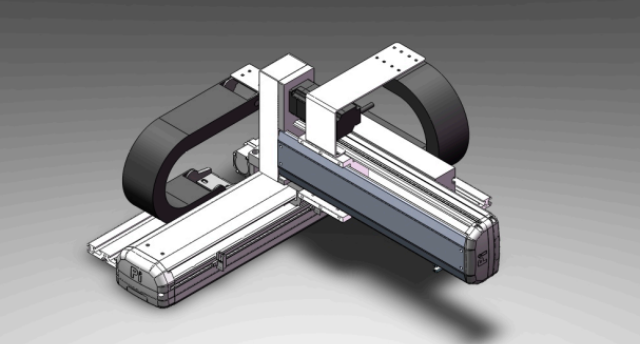
寧夏螺桿型直交機械手廠家直交機械手的機械結構剖析:直交機械手的機械結構猶如其堅實的骨架,支撐著各項功能的實現。其主體框架通常選用**度的鋁合金或鋼材打造,確保在運行過程中具備***的剛性與穩定性,有效抵御振動與變形。傳動部分常見的有滾珠絲杠和同步帶兩種形式。滾珠絲杠憑借高精度、高負載能力的特性,適用于對定位精度要求嚴苛的作業場景;同步帶則以其高速、低噪音的優勢,在追求高效運行的場合大顯身手。導軌系統如同機械手的“軌道”,保障運動部件平穩順滑地移動,減少摩擦與磨損,延長設備使用壽命。而滑塊、連接件等部件則各司其職,緊密協作,共同構建起直交機械手精密且可靠的機械結構體系。 堆碼任務中,直交機械手有序堆碼,整齊...
-
 遼寧懸臂型中負載直交機械手價格
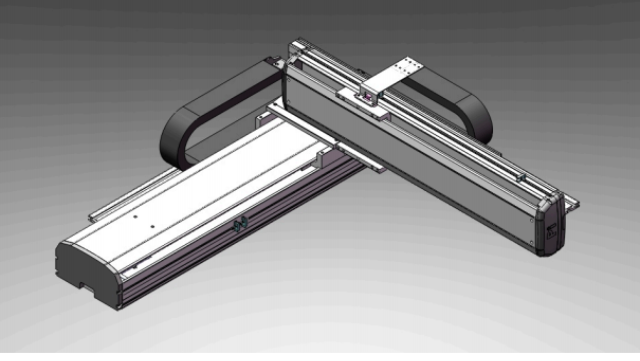
遼寧懸臂型中負載直交機械手價格直交機械手的工作原理基于電機驅動和機械傳動。常見的驅動方式有伺服電機、步進電機等,它們通過皮帶、絲杠、齒輪等傳動機構將旋轉運動轉化為直線運動。以絲杠傳動為例,電機帶動絲杠旋轉,與絲杠配合的螺母則沿著絲杠軸線方向做直線移動,進而帶動安裝在螺母上的機械手部件運動。在這個過程中,控制系統會根據預設的程序和指令,精確控制電機的轉速、轉向和運行時間,從而實現機械手在X、Y、Z軸方向上的精確位移和定位。同時,傳感器實時監測機械手的位置和運動狀態,并將信息反饋給控制系統,以便及時調整控制參數,保證機械手的運動精度和穩定性。這種閉環控制的工作方式使得直交機械手能夠適應復雜的工作任務和高精度的操作要求。 常...