
上海電池系統(tǒng)汽車模擬仿真哪個工具準(zhǔn)確 甘茨軟件科技供應(yīng)
發(fā)貨地點:上海市嘉定區(qū)
發(fā)布時間:2025-07-17

發(fā)貨地點:上海市嘉定區(qū)
發(fā)布時間:2025-07-17
汽車發(fā)動機(jī)控制器ECU仿真通過構(gòu)建硬件在環(huán)或模型在環(huán)測試環(huán)境,復(fù)現(xiàn)ECU的控制邏輯與工作過程。仿真需搭建發(fā)動機(jī)本體模型,模擬進(jìn)氣、燃燒、排氣的動態(tài)過程,輸出轉(zhuǎn)速、水溫、機(jī)油壓力、氧傳感器信號等反饋信號,模型需考慮溫度、壓力對燃燒效率的影響;ECU模型則包含傳感器信號處理(濾波、校準(zhǔn)、故障診斷)、控制算法(如空燃比閉環(huán)控制、點火提前角調(diào)節(jié)、怠速控制)與執(zhí)行器驅(qū)動邏輯(噴油器脈沖寬度、節(jié)氣門開度控制),接收發(fā)動機(jī)模型信號并輸出控制指令,形成閉環(huán)。通過仿真可測試ECU在不同工況下的控制精度,如怠速穩(wěn)定性、急加速時的過渡響應(yīng)、低溫啟動性能,驗證控制算法的魯棒性與安全性。整車制動性能仿真可模擬不同路況下的制動距離與跑偏,為參數(shù)優(yōu)化提供依據(jù)。上海電池系統(tǒng)汽車模擬仿真哪個工具準(zhǔn)確
底盤控制汽車仿真軟件需具備底盤系統(tǒng)建模與控制算法驗證的綜合能力。好用的軟件應(yīng)能搭建制動、轉(zhuǎn)向、懸架系統(tǒng)的高精度模型,如ABS系統(tǒng)的液壓管路模型、EPS系統(tǒng)的助力電機(jī)模型、懸架的多體動力學(xué)模型,定義摩擦系數(shù)、傳動比等關(guān)鍵參數(shù)。支持控制算法(如ESP控制邏輯、EPS助力曲線)的搭建與仿真,分析不同控制策略對車輛操縱性的影響,如制動時的車身穩(wěn)定性、轉(zhuǎn)向時的路感反饋。軟件需具備豐富的路面譜與工況模板,支持標(biāo)準(zhǔn)測試工況與自定義場景的仿真,且能與整車模型無縫集成,實現(xiàn)底盤系統(tǒng)與整車性能的協(xié)同分析,為底盤控制策略開發(fā)提供高效工具。上海整車協(xié)同仿真驗證測試選什么軟件電機(jī)控制模擬仿真實施方案需明確建模標(biāo)準(zhǔn)與測試工況,保障仿真過程規(guī)范有序。
汽車動力性仿真工具的準(zhǔn)確性取決于動力系統(tǒng)模型精度與行駛阻力模擬的真實性。準(zhǔn)確的工具需能搭建包含發(fā)動機(jī)/電機(jī)、變速箱、傳動系統(tǒng)的完整動力模型,準(zhǔn)確輸入動力部件的特性參數(shù),如發(fā)動機(jī)外特性曲線、電機(jī)扭矩特性、變速箱速比。在行駛阻力模擬方面,需考慮空氣阻力、滾動阻力、坡度阻力的精確計算,反映不同車速、路況下的阻力變化。工具應(yīng)能仿真0-100km/h加速時間、最高車速、最大爬坡度等動力性指標(biāo),且仿真結(jié)果需與實車測試具有良好的一致性。同時支持參數(shù)敏感性分析,通過調(diào)整動力部件參數(shù)評估對動力性能的影響,為動力系統(tǒng)選型與參數(shù)優(yōu)化提供準(zhǔn)確參考。
電磁特性仿真驗證與實車測試的誤差主要源于模型簡化與環(huán)境因素模擬的局限性,但通過技術(shù)優(yōu)化可控制在合理范圍。仿真需構(gòu)建電機(jī)、電控系統(tǒng)的電磁模型,考慮磁飽和、渦流損耗等非線性特性,模擬不同工況下的磁場分布與電磁力變化。誤差來源包括:忽略細(xì)微結(jié)構(gòu)對磁場的影響、材料參數(shù)與實際存在偏差、環(huán)境溫度對電磁特性的動態(tài)影響等。通過引入高精度有限元算法、采用實車測試數(shù)據(jù)校準(zhǔn)模型參數(shù),可將關(guān)鍵指標(biāo)(如電機(jī)輸出扭矩、效率)的誤差控制在可接受范圍,滿足工程開發(fā)需求。甘茨軟件科技(上海)有限公司在永磁同步電機(jī)控制仿真方面有成功案例,其在電磁特性仿真驗證領(lǐng)域的經(jīng)驗可有效縮小與實車測試的誤差。新能源汽車仿真測試軟件的選擇,需關(guān)注其對電池、電驅(qū)等系統(tǒng)的適配性及測試流程的完整性。
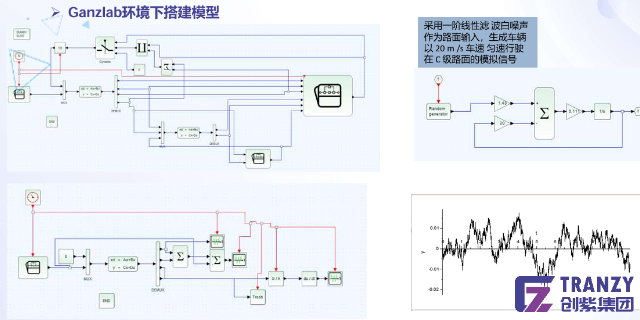
整車半主動懸架仿真及優(yōu)化測試軟件需具備多體動力學(xué)建模與控制算法聯(lián)合仿真能力。軟件應(yīng)能搭建包含彈簧、阻尼器、導(dǎo)向機(jī)構(gòu)的懸架多體模型,準(zhǔn)確定義彈性元件剛度、阻尼系數(shù)等參數(shù),模擬懸架在不同路面激勵下的動態(tài)響應(yīng)。同時支持與控制算法模型(如PID控制、模型預(yù)測控制)聯(lián)合仿真,分析阻尼調(diào)節(jié)策略對車身姿態(tài)的影響,如側(cè)傾抑制、振動衰減效果。優(yōu)化模塊需能通過參數(shù)迭代,尋找不同工況下的阻尼系數(shù),提升乘坐舒適性與操縱穩(wěn)定性。這類軟件需適配整車多體動力學(xué)模型,實現(xiàn)懸架系統(tǒng)與整車性能的協(xié)同分析,為半主動懸架的參數(shù)匹配與控制策略優(yōu)化提供可靠工具。動力系統(tǒng)模擬仿真基于多物理場耦合模型,復(fù)現(xiàn)動力輸出與能耗的動態(tài)關(guān)系。上海新能源汽車汽車仿真用什么軟件好
汽車發(fā)動機(jī)過程仿真控制工具通過模擬燃燒、排放等過程,助力優(yōu)化控制策略,提升運(yùn)行效率。上海電池系統(tǒng)汽車模擬仿真哪個工具準(zhǔn)確
汽車聯(lián)合仿真測試軟件通過標(biāo)準(zhǔn)化接口(如FMI、FMU)實現(xiàn)不同領(lǐng)域仿真工具的協(xié)同工作,突破單一軟件的功能局限與數(shù)據(jù)壁壘。在整車開發(fā)中,多體動力學(xué)軟件可與控制算法軟件聯(lián)合,仿真底盤控制策略對整車操縱性的影響;流體力學(xué)軟件與熱力學(xué)軟件聯(lián)合,分析發(fā)動機(jī)散熱與氣動特性的耦合關(guān)系。針對新能源汽車,聯(lián)合仿真可整合電池電化學(xué)模型、電機(jī)控制模型與整車動力學(xué)模型,實現(xiàn)三電系統(tǒng)與整車性能的協(xié)同優(yōu)化。這類軟件需具備強(qiáng)大的模型數(shù)據(jù)管理能力與高效的計算引擎,支持不同格式模型的無縫對接與實時數(shù)據(jù)同步,確保聯(lián)合仿真的效率與精度,為復(fù)雜汽車系統(tǒng)的多域優(yōu)化提供多方面技術(shù)支撐。上海電池系統(tǒng)汽車模擬仿真哪個工具準(zhǔn)確




